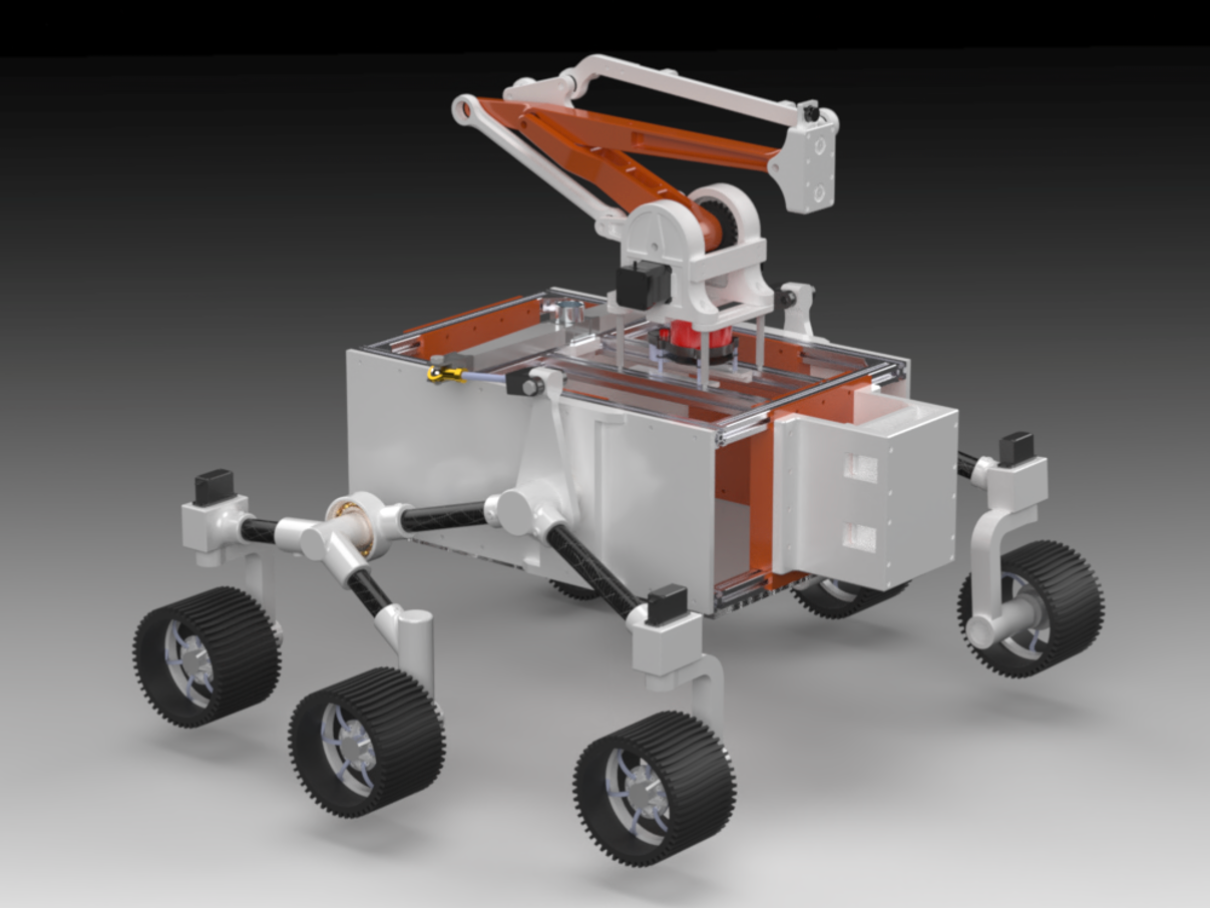
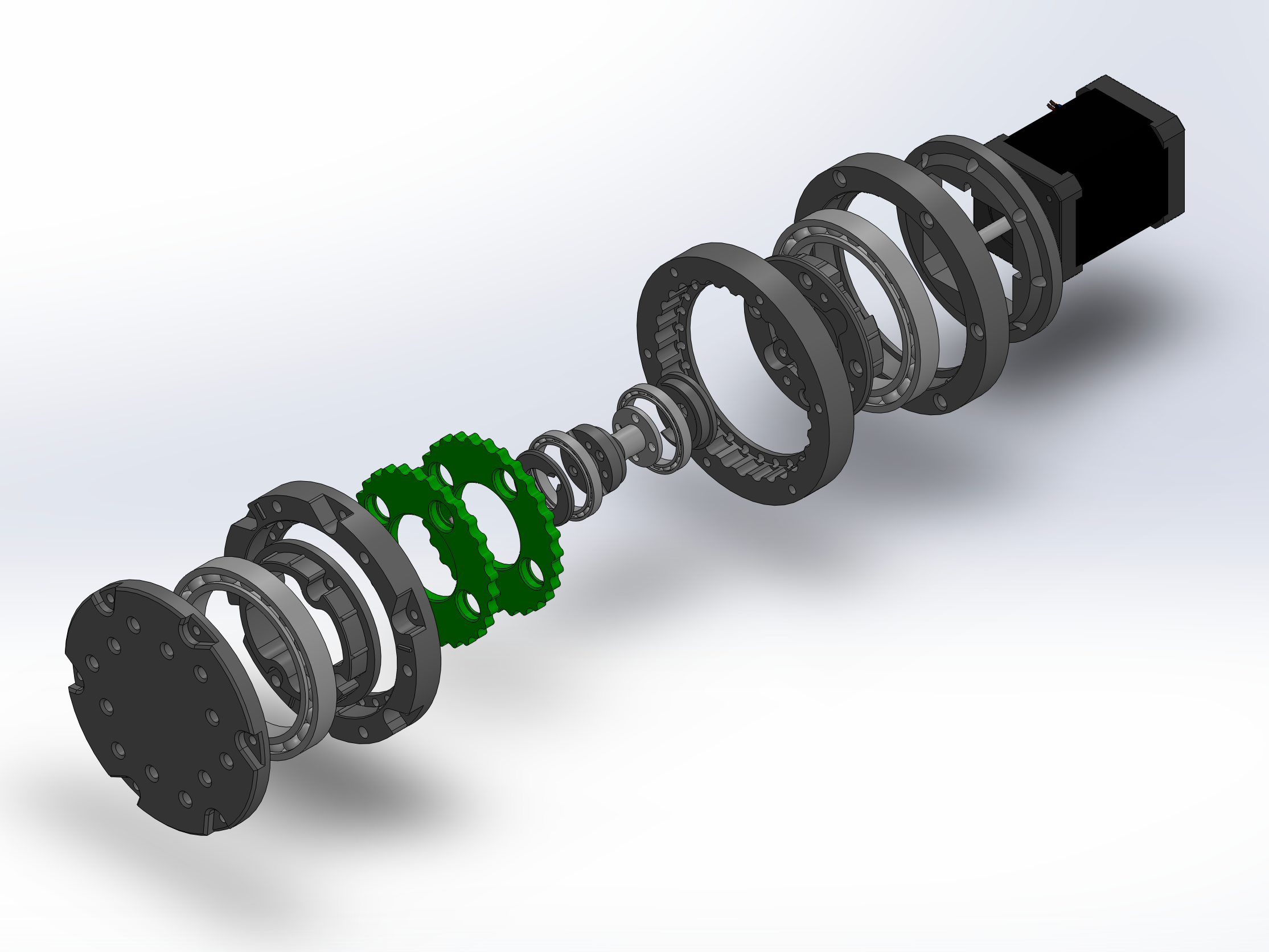
Currently developing a 6-DOF robotic arm, with the base, shoulder and elbow joints completed. The system utilizes custom designed 30:1 cycloidal gearboxes producing approximately 25 N·m of torque. Link geometries were designed to maximize stiffness and reduce torsional and bending loads while minimizing weight.