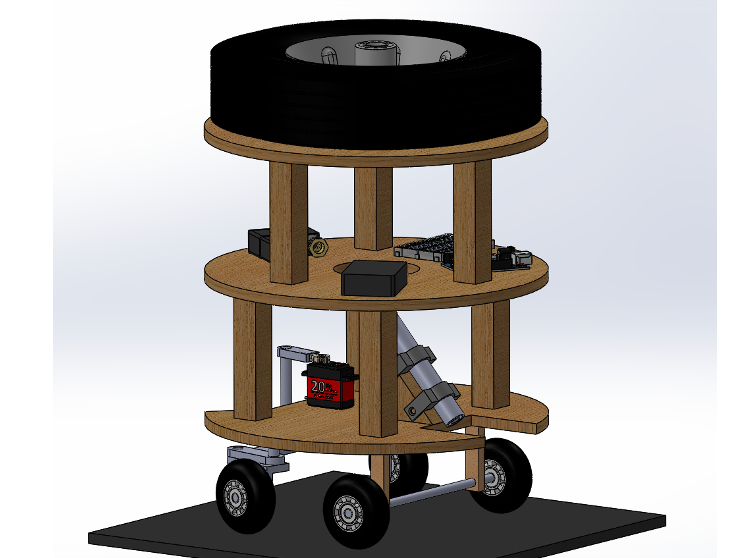
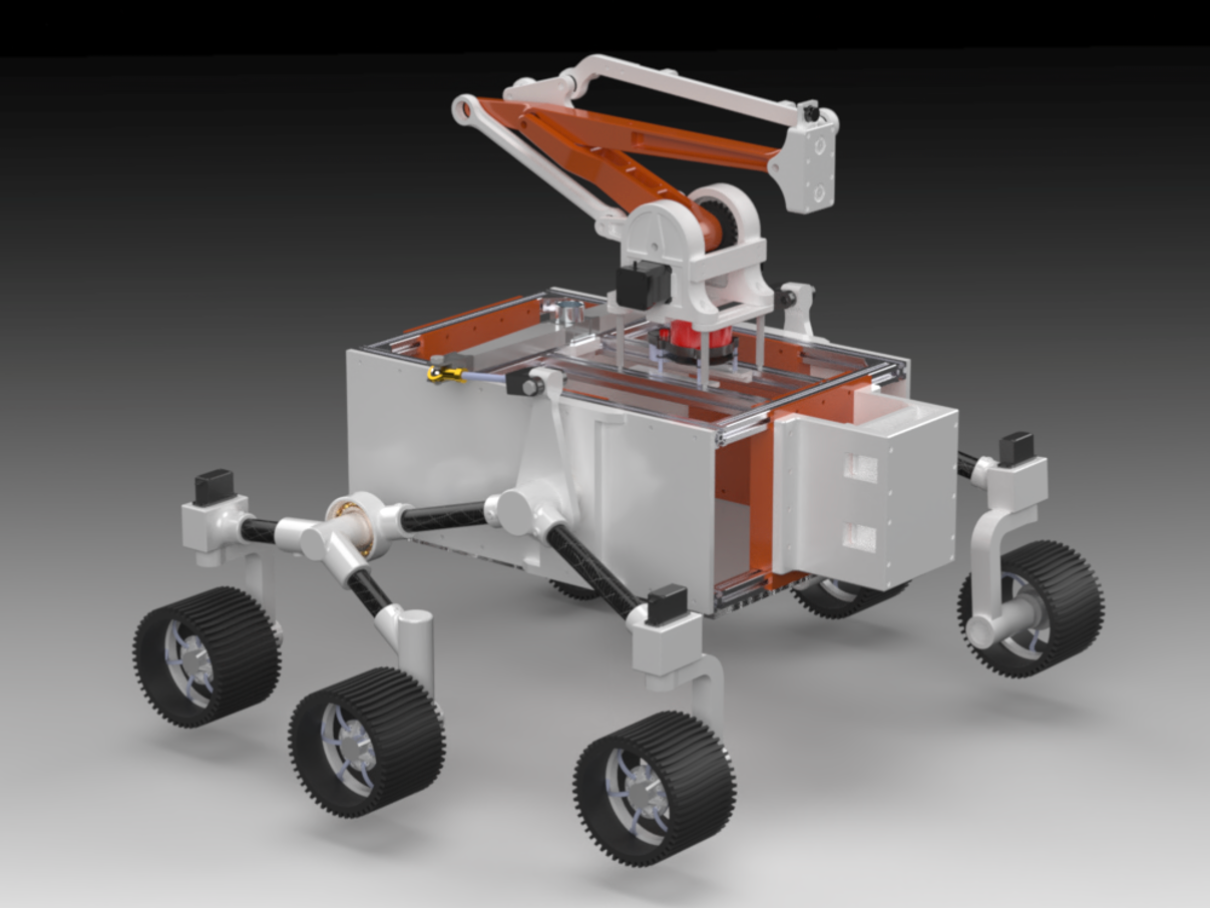
Designed and fabricated a Bluetooth-controlled and IR track-following robotic walker, with a focus on computer-controlled linkage systems. Using GeoGebra, we created and analyzed digital models, including a four-bar linkage, to optimize the robot's movement. The project involved iterative design, motion analysis, and assembly, progressing from digital prototypes to physical models. Key milestones included integrating sensors for track-following, performing motion studies, and demonstrating the walker's capabilities through an in-class autocross challenge. The frame was based off of the movie,

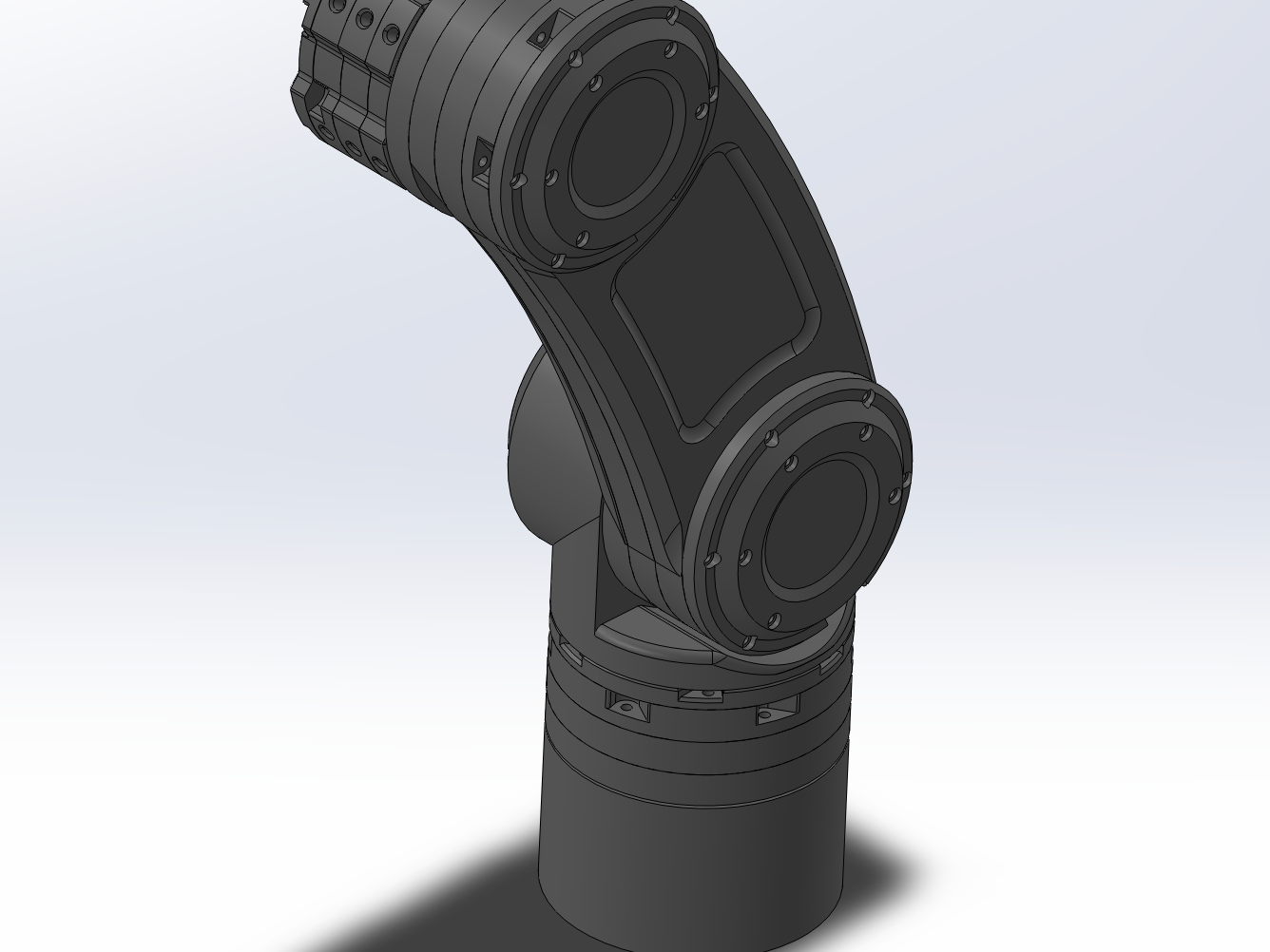
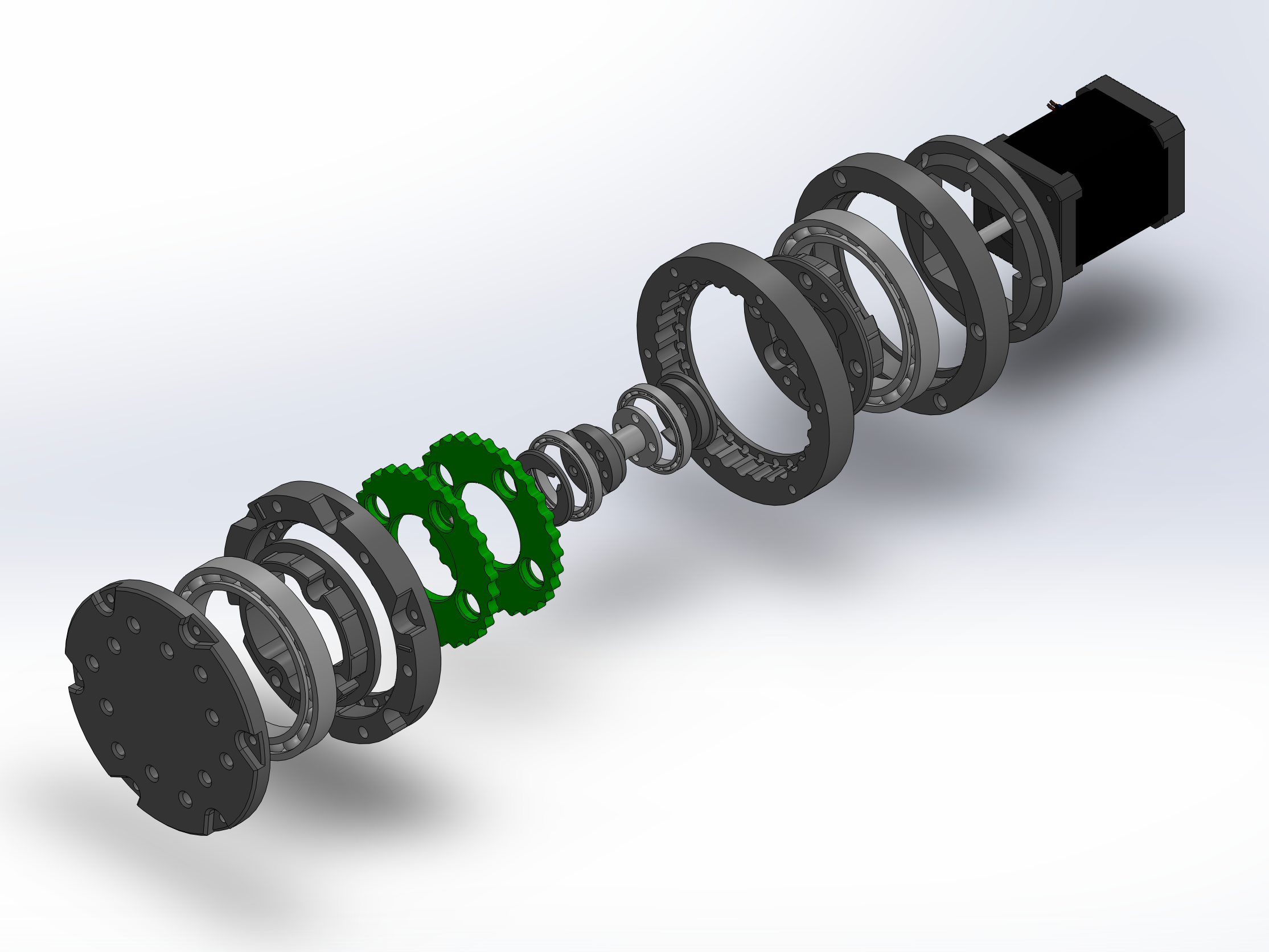
Robot Linkage