1st Place - 2025 Southwestern Regional Engineering Competition
Inspired by NASA’s Perseverance Rover, this award-winning project delivers an autonomous, flyer-dispensing rover designed to interact with students across UCI’s campus. The rover navigates outdoor terrain, detects bystanders, and uses a vacuum-powered propulsion system to distribute flyers in real-time.
As Lead Mechanical Engineer, I directed a 6-person cross-functional team, owning the full mechanical development cycle, from concept and prototyping to manufacturing and validation. I worked closely with electrical and controls teams to ensure seamless subsystem integration and reduce rework through structured testing strategies.
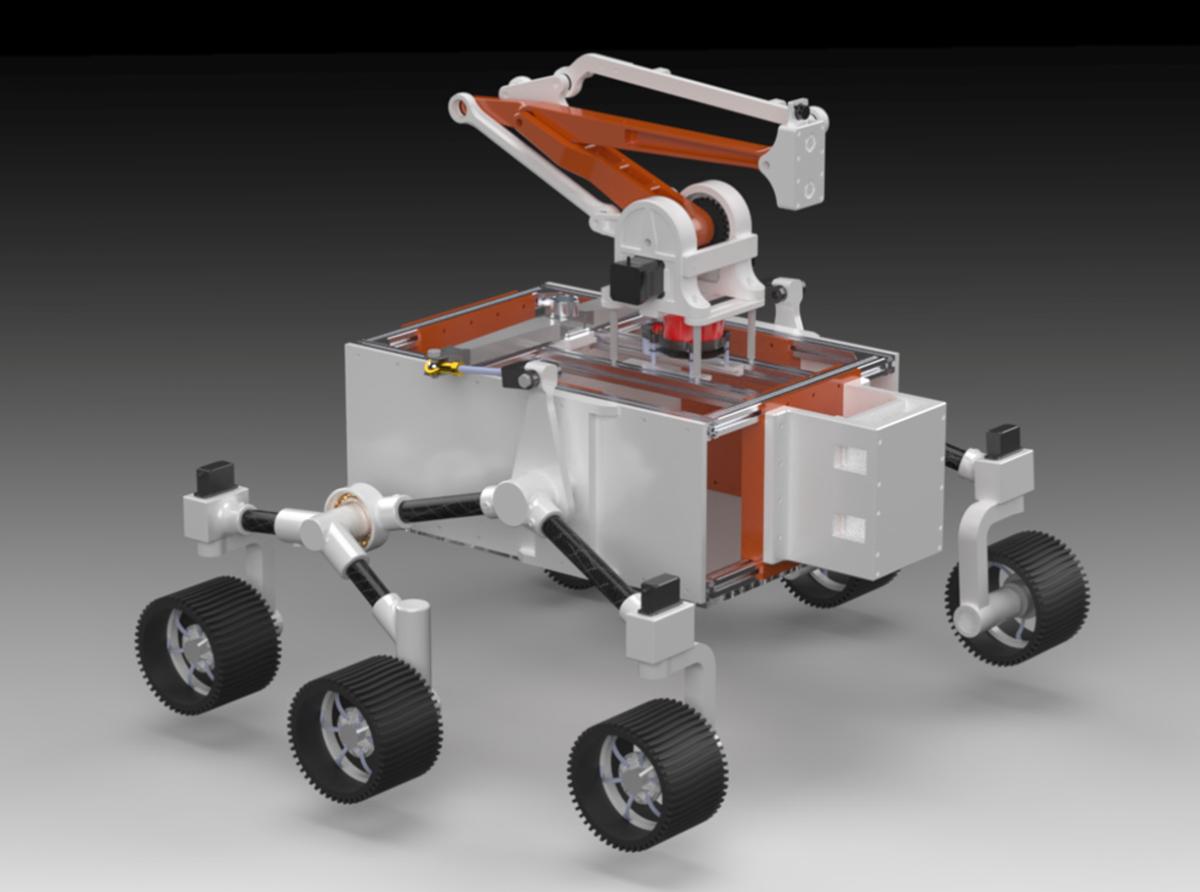
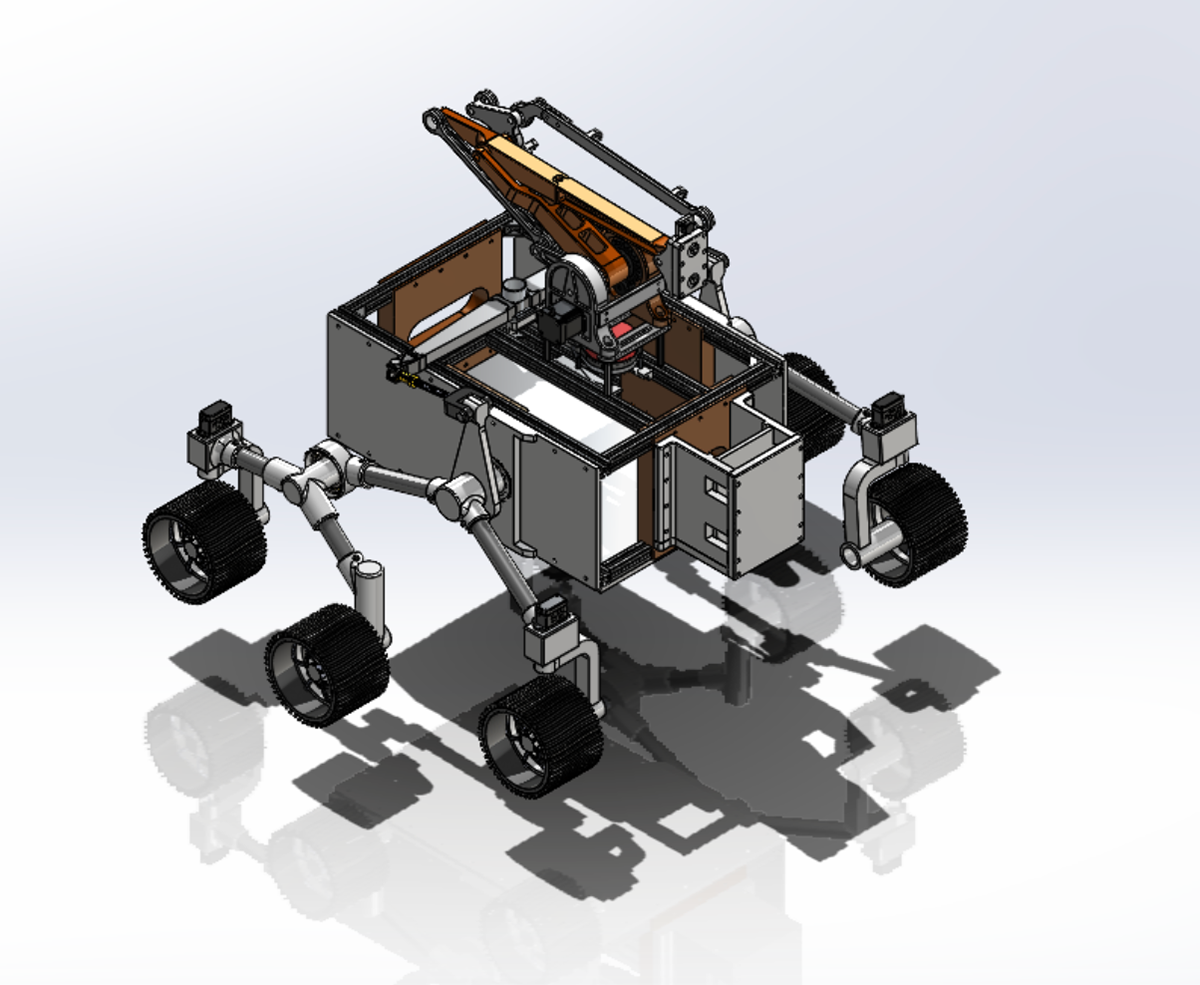
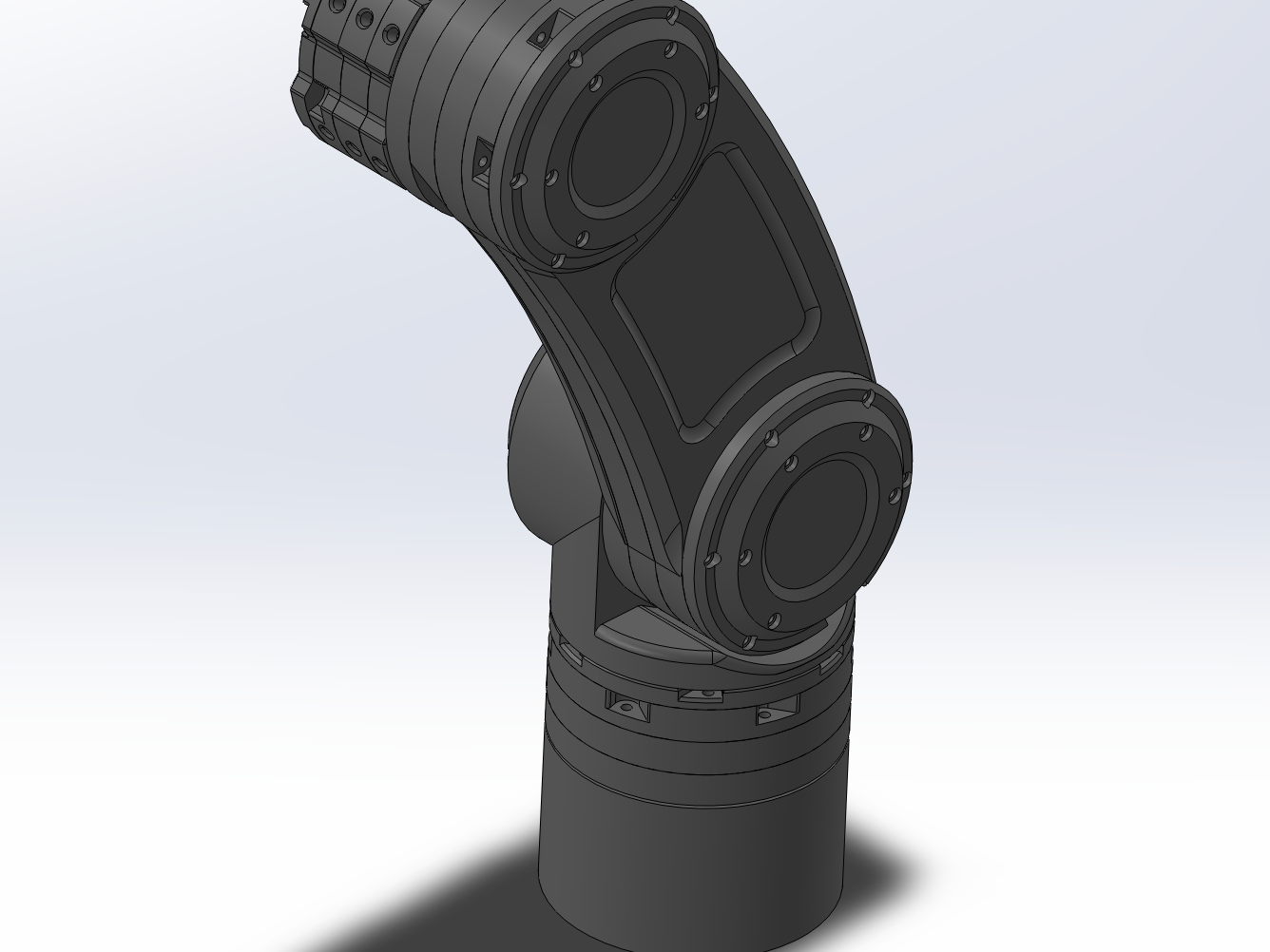
SolidWorks full Assembly
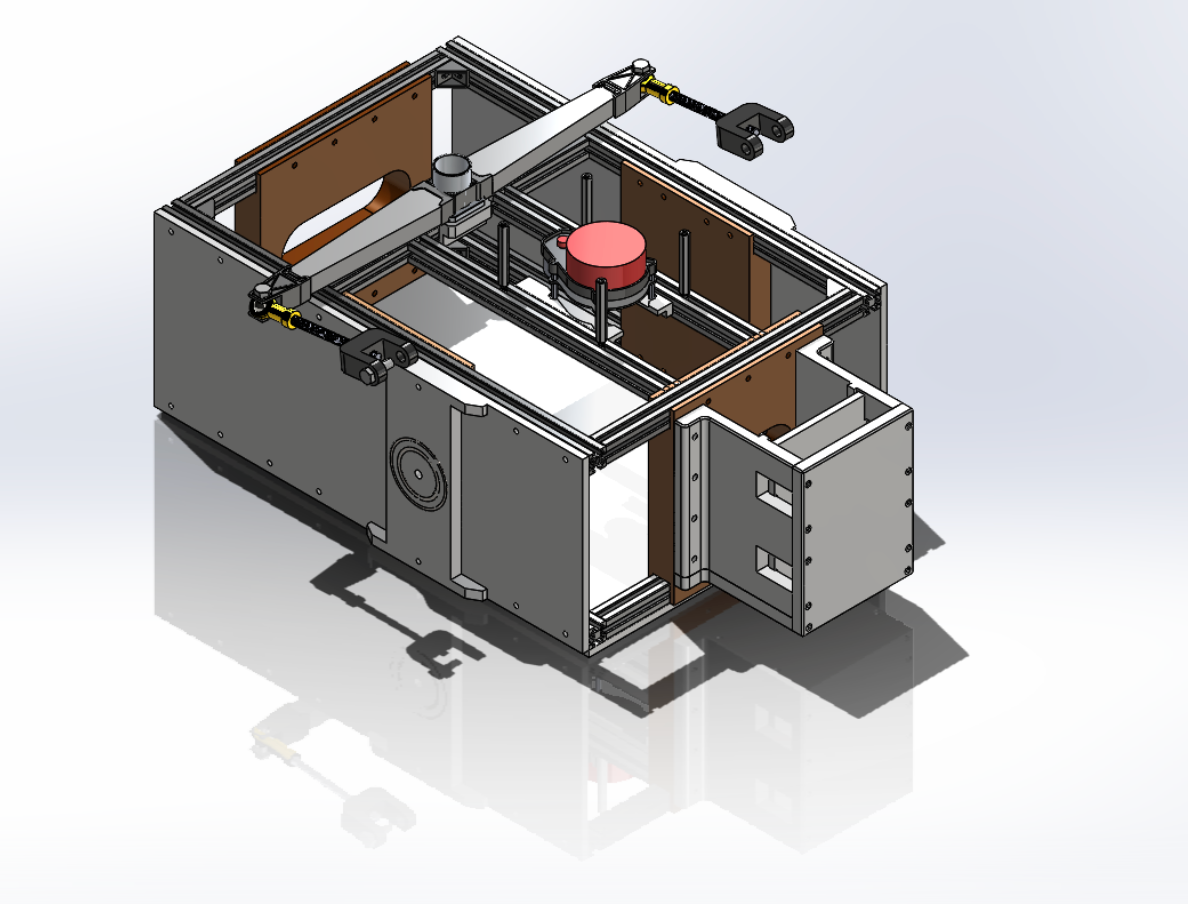
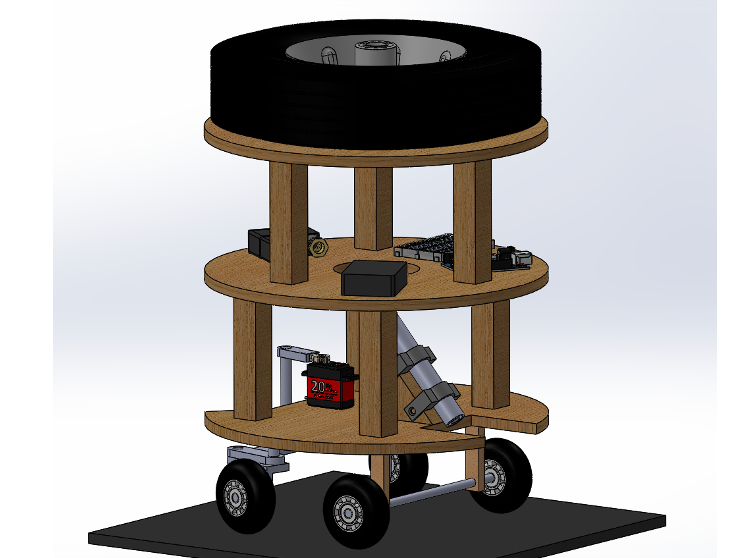
Chassis of Rover
System Design
Led chassis design using 20x20 aluminum extrusion and HDPE sheeting, balancing durability, weight, and ease of assembly.
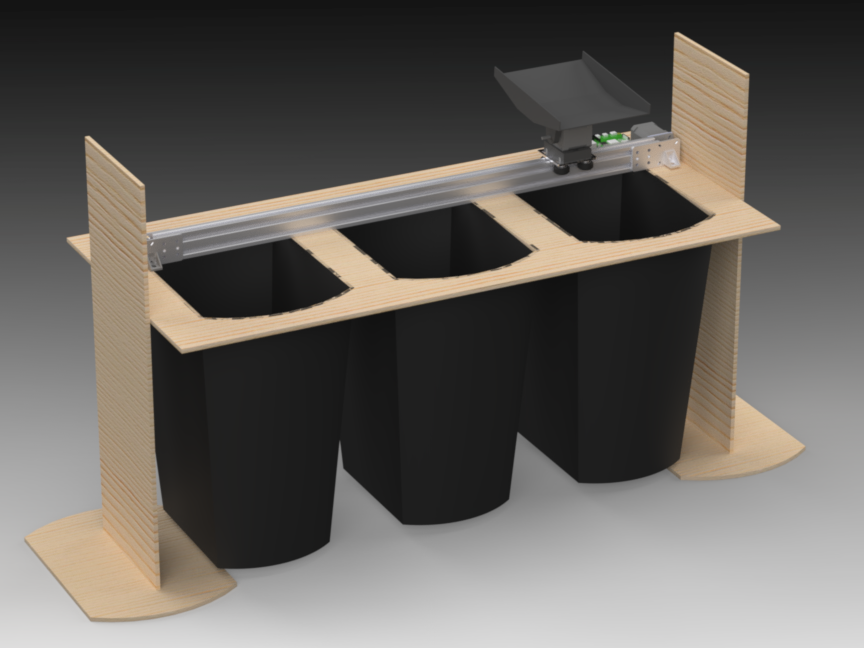
Integrated mechanical mounting points for the flyer dispenser, GPS module, and linear bearing slider.
Oversaw a rocker-bogie suspension using parametric SolidWorks sketches for robust terrain adaptability.
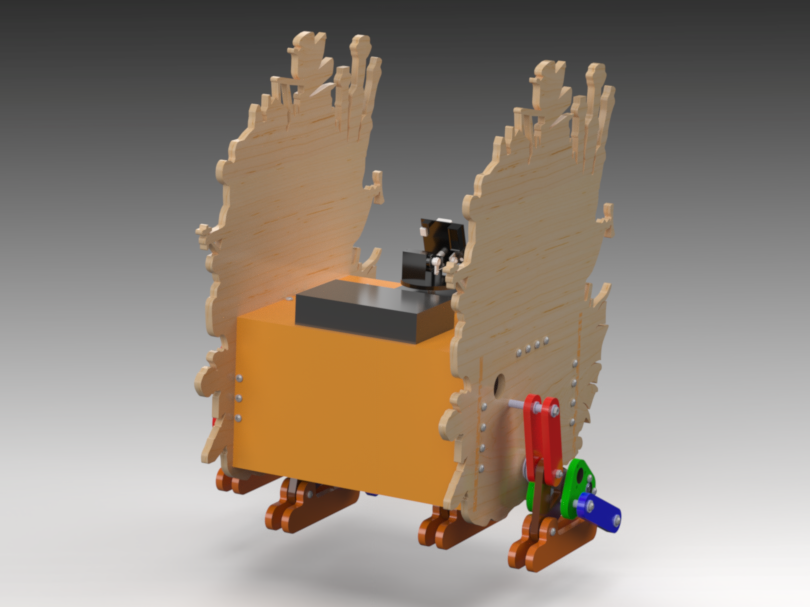
Manipulator & Dispenser Development
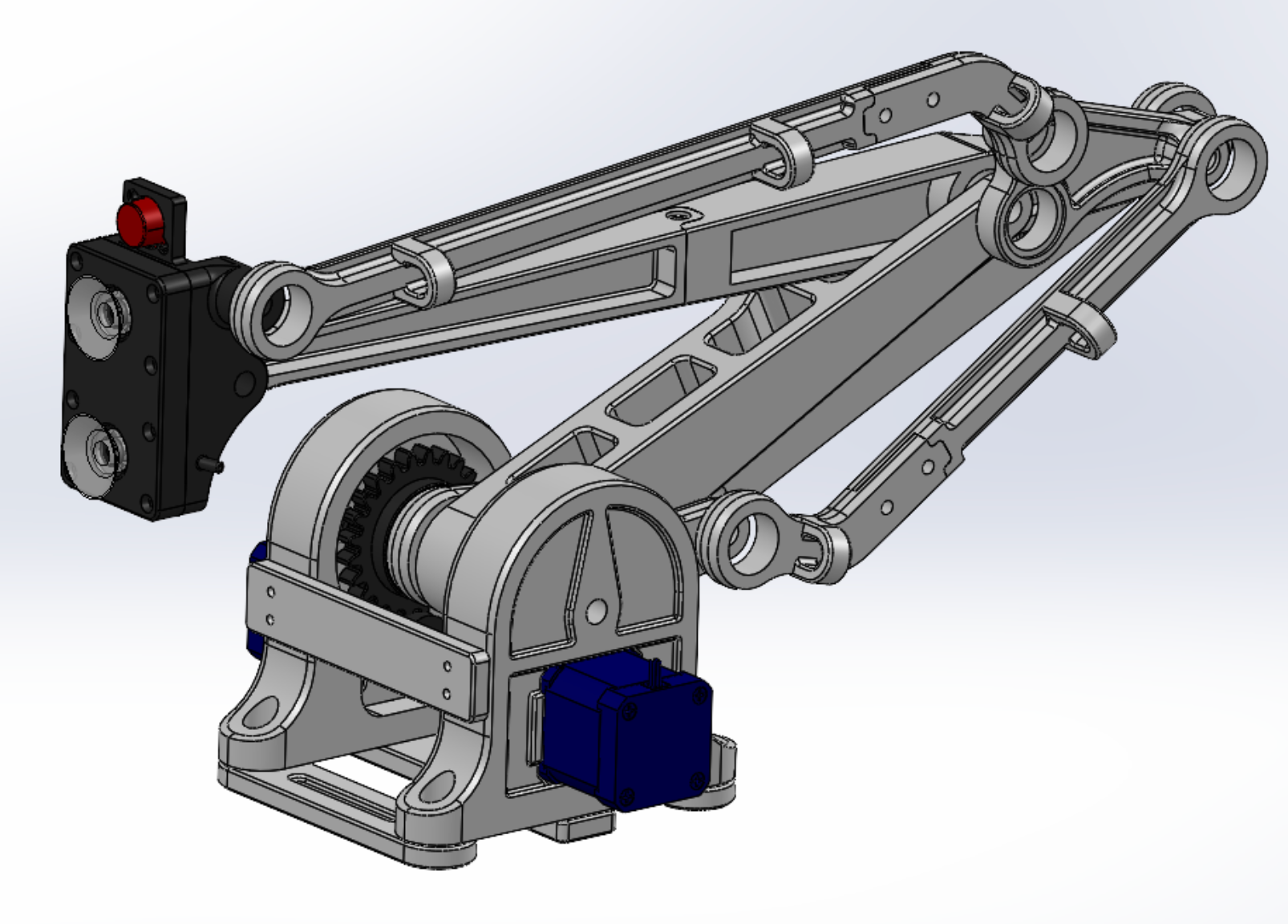
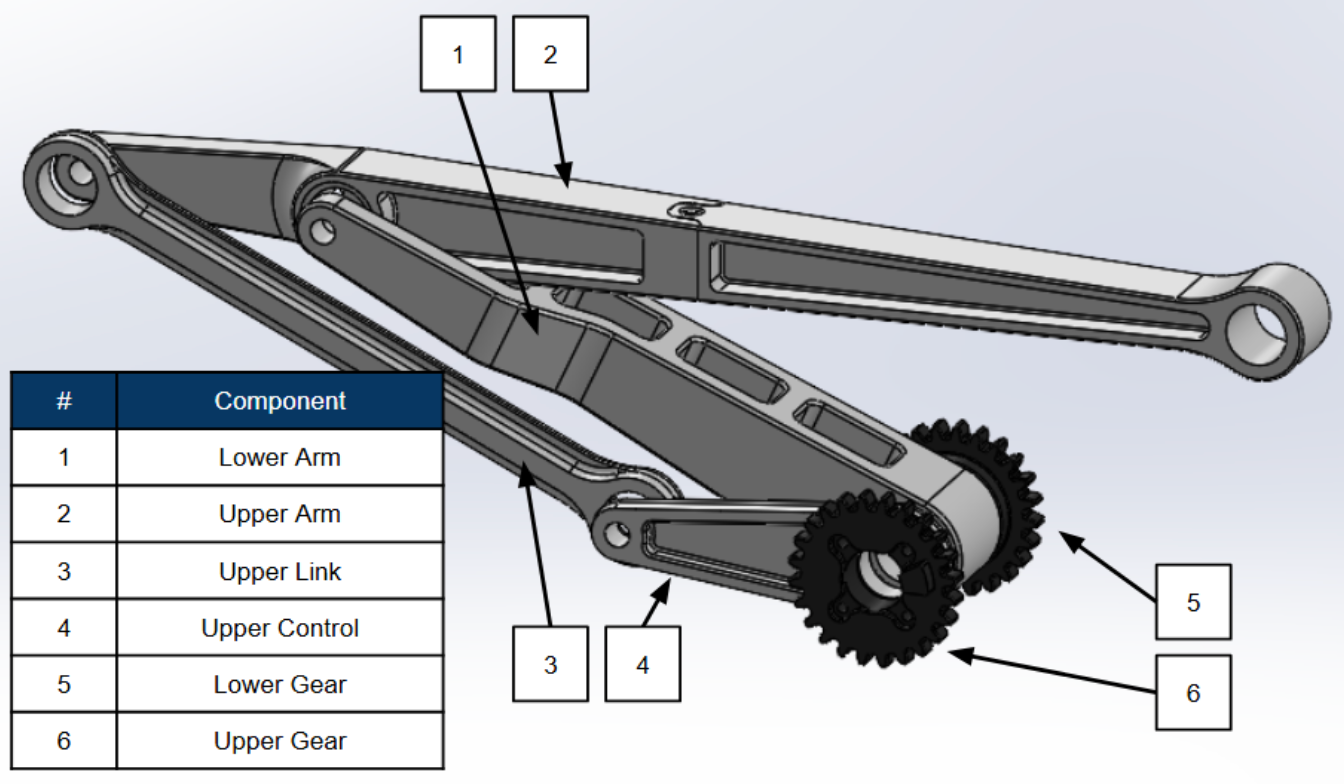
Designed a 2 DOF flyer-dispensing manipulator constrained to a 196mm stowed height and 651mm dispensing height
Optimizing linkage geometry via a custom MATLAB script that iterated thousands of configurations to fit the chassis envelope.
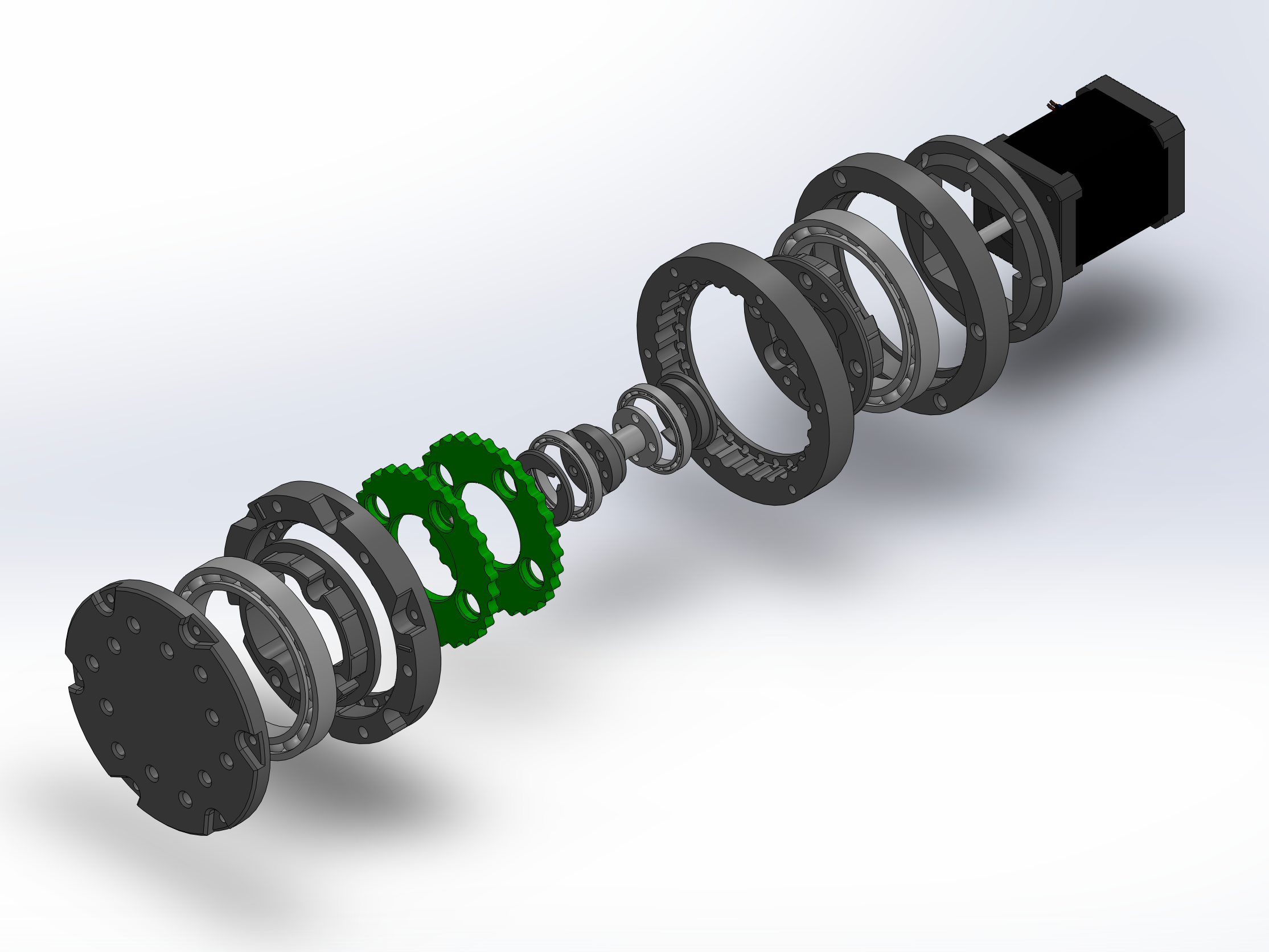
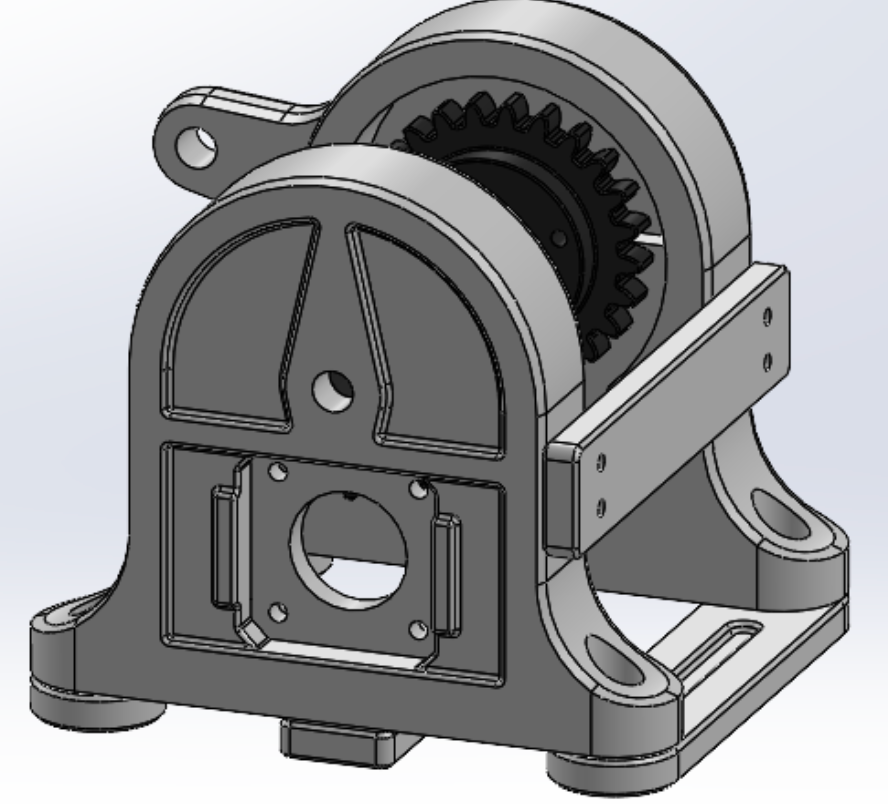
Validated actuator torque requirements (peak ~0.8 N·m) using simulations, informing selection of NEMA 17 stepper motors with custom encoder back-plates for closed-loop position feedback.
Testing, Validation & Competition
Simulated test conditions during integration to verify mechanical readiness before competition.
Conducted functional testing of arm movement, wheel articulation, and vacuum delivery under real-world constraints.
Presented system functionality and won 1st Place at the 2025 Southwestern Regional Engineering Competition, outperforming 20+ interdisciplinary teams.


Tools & Technologies
CAD & Simulation: SolidWorks, SolidWorks Simulation, MATLAB, Simulink
Manufacturing: 3D Printing (PETG), CNC Machining, Laser Cutting
Controls & Embedded: ESP32, Arduino Mega, UART, I2C, Limit Switches
Actuation: NEMA 17 Stepper Motors, Vacuum Pump, Servo Motors
Project Tools: BOM Tracking, Tolerance Stackups, Technical Presentation